| 剱岳周辺 |
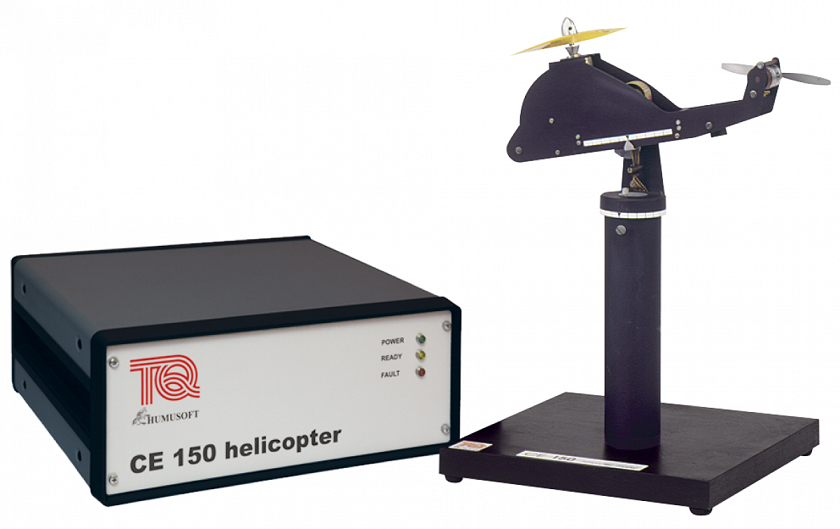
CE150 ヘリコプター姿勢制御実験装置Helicopter Model
|
クリックすると画像が拡大します
|
不安定なヘリコプター制御を学習するための卓上型実験装置です。
ヘリコプターはDCモータで駆動する2個のプロペラ(メインロータとテイルロータ)があり、ヨー姿勢角(左右方向)とピッチ姿勢角(上下方向)を制御する2入力、2出力システムです。
重心を変化させて制御システムをテストすることもできます。
MATLAB Real-Time Workshop用のドライバが付属しています。
ソフトウェアをMATLAB(別売)と組み合わせて制御システムを創り出すことができます。
※制御実験装置の取扱説明書及びソフトウェアは全て英語仕様となっておりますので予めご了承ください。
|
|
|
| 【必須補助装置】(別売) |
| 装置に適合するコンピュータ |
推奨ソフトウェア
|
MATLAB 5.3
Simulink 3
Real-Time Workshop 3
Real-Time Workshop Target 1.0
Watcom C/C++コンパイラ
|
| 寸法: |
|
| ヘリコプター |
:長さ300mm(プロペラ除く) |
|
:長さ370mm(プロペラ含む) |
| モデル台座 |
:300x300mm |
| 高さ |
:440mm |
| 保護ケージ |
:800x800x800mm |
| 質量 |
:約3.5Kg |
| インターフェース |
:480x140x307mm 約5.5Kg |
| 供給電源 |
:AC220/240V, 200W, 50Hz |
|
|
|
視覚フィードバックで高度な2次元制御を行う卓上型実験装置です。
ステッピングモータにより2方向の傾きを変えるプレートとボール、視覚識別システムを持ったデジタルカメラで構成されています。
ボール位置はリアルタイムに測定され基本制御タスクがボール位置を制御します。制御タスクは視覚フィードバックを利用するロボティックス(経路計画、追跡)の諸問題をシミュレーションします。
インターフェースライブラリ及びPIDコントローラを含んだ対話式ソフトウェアは多項コントローラやファジーロジックコントローラの開発ができます。
|
|
  制御工学実験装置 カタログダウンロード(PDF 815KB)・・・・右クリックで対象を保存 制御工学実験装置 カタログダウンロード(PDF 815KB)・・・・右クリックで対象を保存
|
Copyright(c)2009 MEGACHEM CO.,LTD. All Rights Reserved |